by Oluwalogbon Akinnola, PhD student in the Department of Bioengineering
The Other Hand Model
If the first thing you think of when you hear the phrase ‘hand model’ is David Duchovny in the 2001 film Zoolander, then congratulations on your excellent taste. Unfortunately, however, no one was willing to fund a PhD researching his performance. No, in the world of Biomechanics hand model means something different yet no less appealing.
Our hands are how we communicate and manipulate the world around us. Feeding ourselves, checking the bathwater, even holding the medium this text is printed on: we use our hands to keep us healthy, happy, and safe. Understandably, this multifunctional system is complex. One quarter of the bones in the body are in the hands. They controlled by an intricate network of muscles and nerves that provide the most tactile feedback in the body and let us do everything from handstands to card tricks. It is this complexity that makes it difficult to find a solution when things go wrong. Hand injury accounts for almost a fifth of cases at A&Es across the country and the UK spends over £100million a year treating them. Osteoarthritis of the hand affects at least 1.56 million people in the UK and there is no known cure. Understanding exactly how the hand works is vital to finding appropriate solutions to these problems.
My research is concerned with creating an accurate representation of the human hand. Specifically, I’m using mathematical equations and experimental data to create a computer simulation that will replicate the behaviour of the hand in various conditions. This will allow us to investigate nonhealthy hands and gain insight into how to heal them. The model I have been working on is an inverse kinematic model. This means that it works out the forces inside the hand from the movements, or kinematics, of the hand. For example, what is the force on your wrist when you pick up a cup? Motion capture, the same technology Andy Serkis used to give us Gollum, is used to provide the motion input for the model and the results are verified using cadaveric testing and electromyography (EMG).
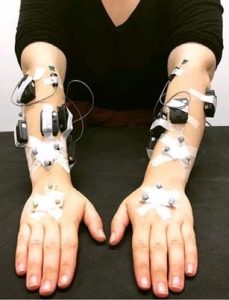
EMG is the detection of the electrical signal produced by your muscles when they move and gives an indication of how much effort the muscle is exerting. In cadaveric testing, we apply forces to the tendons in a hand and measure the kinematics. Imagine Thing from The Addam’s Family but with pulleys. I compare the signal patterns and applied forces to the model results to verify that the model. With all three in agreement, I can conclude that the model is representative of the hand. Thus, it can be used to simulate the effects of surgery and rehabilitation to find the best solutions to hand injuries and diseases. Solutions that could change millions of lives for the better. This hand model may not be wearing diamond ring but I think it pretty exquisite.