
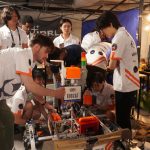
Congratulations to the Imperial Planetary Robotics Lab (IPRL) team – a student-led group who brought together talent from Aeronautics, Electrical and Electronic Engineering, and Mechanical Engineering and were the only UK team to qualify at the European Rover Challenge.
Student teams from universities around the world design unique Mars rovers. After months of hard work their concepts are aessessed by space sector professionals, and qualifying finalists test their prototypes on a realistic Martian terrain in a number of demanding tasks based on real NASA and ESA missions.
In just three years, the IPRL team has grown from a small start-up of enthusiasts to a cross-department community of engineers competing against some of the best university rover teams in the world.
This blog post, written by EEE’s Ryusei Kinosaki, takes us through the students’ journey from initial one-off prototype, to this year’s modular Robot Operating System-based design.










A space for space
Imperial Planetary Robotics Lab is a student project group founded in 2022, with a long-term goal to create a space for passionate space and robotics enthusiasts. Our first project, which continues to this day, was the rover project, where we build a realistic, working rover to take part in the European Rover Challenge (ERC).
The ERC is an annual competition where university rover teams from around the world come to test their rover and engineering skills by executing various tasks set by the organisers on mars-like terrain, called the Mars Yard. Tasks include autonomous navigation, manipulation of a maintenance panel using a robotic manipulator, as well as sampling of rocks, regolith, and deep samples using the robotic manipulator and a drill subsystem. Although the new rules and tasks come out around February every year, the design and manufacturing process starts at the start of each academic year to make up for the busy period during the finals and groupwork season in Imperial.
2023 – Keeping it simple
To keep the team simple and robust, we decided on 3 core philosophies: keep the team small – which led us to a team of ~12 – stick to requirements to avoid overengineering, and to keep testing to iterate our design. Our goal for the first year was to make the ERC finals, which would mean placing top 25 in the qualification process. We clinched top 24, which meant that we were on the way to Kielce, Poland to compete against other new and veteran teams. Although we were against many rovers with years of development and experience, our simple construction allowed us to do well in most tasks, leading to 11th place in 2023, beating other well-known teams such as STAR Dresden and BEARS, from technical universities of Dresden and Berlin, respectively.
2024 – Ambitious upgrades
Although the first year was quite successful, the rover itself was a one-off with little room for improvement. Hence, our team was expanded to 20 to include new subsystems and upgrade the rover: 3D printed tyres, rotatable wheels, a new drilling system, and an aluminium suspension system. Although the manufacturing demand delayed our production timeline, we still qualified for ERC 2024 at top 16, which would take place in Kraków, Poland to celebrate the competition’s 10th anniversary. However, the complex nature of the rover system delayed the electronics system’s assembly and testing, which ended our finals run with 17th place.
2025 – Hitches and glitches
For 2025, we decided to build a rover with robust driving base and overhauling of electronics to prevent the mistakes we made last year. Hence, that led to a rover with differential steering like in the first year, as well as a Robot Operating System (ROS) -based software and electronics system. Each subsystem’s PCB and microcontroller is controlled by a ROS node initialised by a central computer. As the previous two years, we qualified for the finals as the 6th best team.
Watch the team’s qualifying video:
On the finals itself, although the rover this year seemed more ready than the previous year’s, some small hitches rendered some parts of the rover’s subsystem unusable. For example, the robotic manipulator was hard to control, which led to missing the pH probe inside the measurement site for the newly introduced astro-bio task. The drilling system’s payload servo also had an overheating problem, which prevented us from drilling into the deep sampling site without piercing through the payload. Moreover, the higher latency on-site due to the unexpected interference of the venue made the execution of the task slower than one had planned during the testing on campus.
Our final standing for the ERC2025 was 16th place, which was much lower than we had hoped for, but that doesn’t mean this year wasn’t a successful year. We had still completed the goal of a robust and reliable driving system, as well as a modular electronic system, that requires only minor improvements.
Lessons learned
Engineering always involves failures and learning lessons from them, which will be our objectives for the next year: The main subsystem that needs to be reworked would be the robotic arm, where we plan to rebuild from scratch, as well as adding autonomy to the rover’s driving.
Finally, we would like to express our thanks to all our supporters and sponsors: Imperial College Robotics Society, Electrical and Electronic Engineering, Magdrive, Accu, Imperial College Space Society, and Department of Aeronautics. Our journey would not have been possible without them.
Ryusei Kinosaki
As one of the BOBCat team sponsors, Professor Tim Green proudly signed a team shirt on behalf of EEE. A fitting celebration of a student group that has shown “perseverance, creativity and collaboration in abundance”.
Congratulations once again to all the students involved across EEE, Aeronautics and Mechanical Engineering, some of whom have just finished their undergraduate studies this summer.
We look forward to following the next chapter of IPRL’s rover story in 2026.
Roll call – EEE students involved in IPRL 2025: